AsianScientist (Jul. 5, 2018) – Scientists in Hong Kong have developed a robotic system that can perform neurosurgery inside a magnetic resonance imaging (MRI) scanner. They published their findings in IEEE Robotics and Automation Letters.
Stereotactic neurosurgery involves using an external positioning system to locate targets of surgical interest and guide minimally invasive surgery. It is one of the few treatments available for neuropsychiatric disorders such as Parkinson’s disease, essential tremor and major depression.
Parkinson’s disease alone is the second most common disease of the nervous system after Alzheimer’s disease, and is projected to affect over 8.7 million people worldwide by 2030. Hence, improvements to stereotactic neurosurgery would benefit a large population.
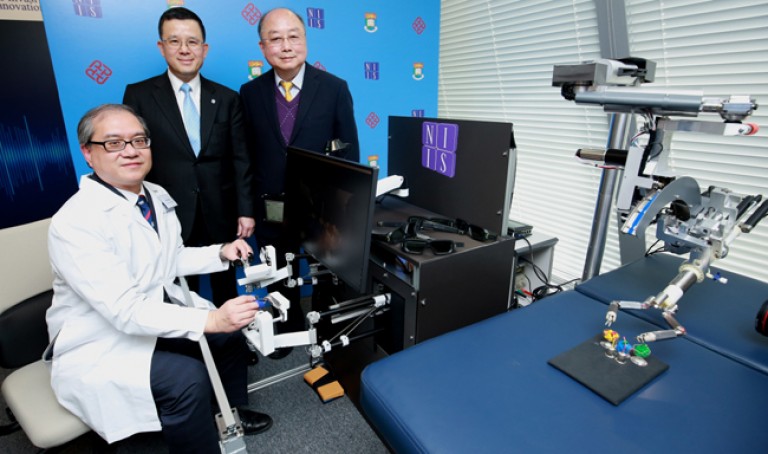
In this study, a team of scientists at the University of Hong Kong led by Dr. Kwok Ka-wai designed a neurosurgical robotic system capable of performing bilateral stereotactic neurosurgery inside an MRI scanner. Because MRI scanners have very strong magnetic fields and most metallic components are forbidden in MRI environments, the team developed a tele-operated robotic system driven by liquid.
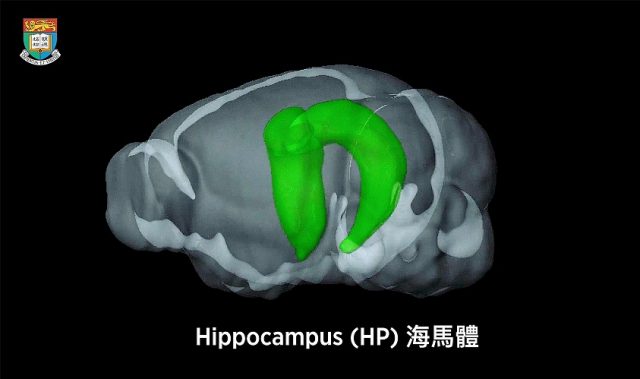
The system does not generate any electromagnetic interference or affect imaging quality. A manipulator is designed to perform dexterous operations on the left and right brain targets, and the area required for an invasive anchorage is very small.
Furthermore, the compact robot can fit inside a standard MRI head coil, and advanced three-dimensional tracking markers enable fast localization of robot instruments in MRI in real time.
The team conducted pre-clinical validation of the system with Dr. Danny Chan Tat-ming and Professor Poon Wai-sang, both neurosurgeons at the Chinese University of Hong Kong. This innovation is expected to facilitate the treatment of Parkinson’s disease and other neuropsychiatric disorders, said the researchers, allowing more accurate and effective brain surgery. Further clinical studies will be conducted to determine the efficacy of the system.
The article can be found at: Guo et al. (2018) Compact Design of a Hydraulic Driving Robot for Intraoperative MRI-Guided Bilateral Stereotactic Neurosurgery.
———
Source: University of Hong Kong.
Disclaimer: This article does not necessarily reflect the views of AsianScientist or its staff.