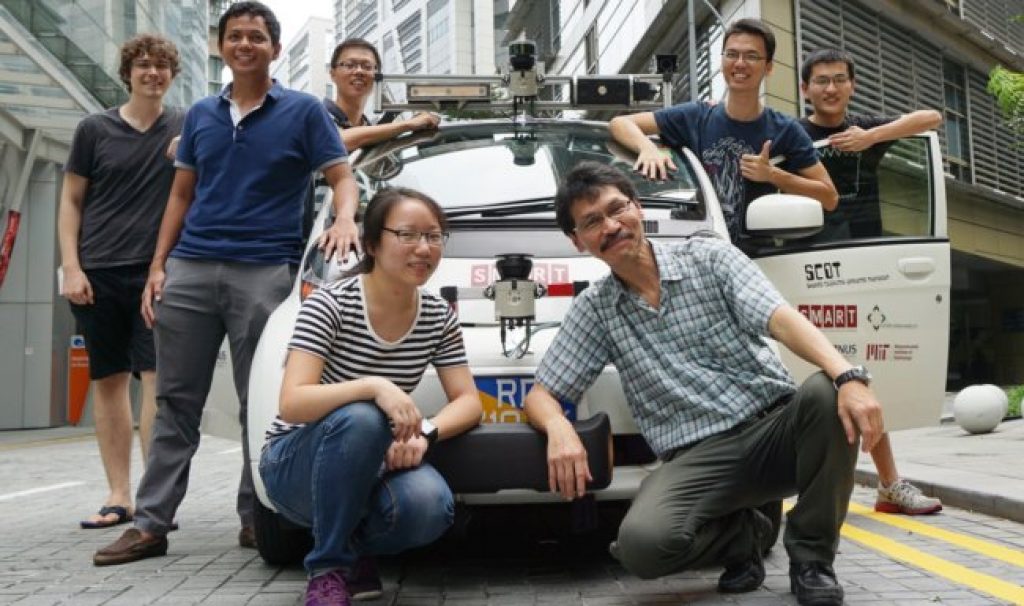
AsianScientist (Oct. 13, 2015) – A team of researchers from the Singapore-MIT Alliance for Research and Technology (SMART) and the National University of Singapore (NUS) has launched a trial for driverless cars on public roads. The autonomous vehicle (AV) trial, one of the first to be approved by the Singapore Land Transport Authority (LTA), will use a 6 km route within the One-North business park starting from Oct 12, 2015.
Through this one-year trial, the SMART-NUS AV group will be advancing its vehicles’ self-driving capabilities, working towards more sophisticated demonstrations of autonomous Mobility-on-Demand (MoD) transportation services. One-North presents new challenges of road interactions with real traffic (uncontrolled environment), and more complex interactions such as cross-junctions and traffic lights.
Adapted from its prototype driverless golf cart, the driverless car dubbed SCOT (Shared Computer Operated Transport) has been operationally-ready for the public roads since January 2014. Unlike other driverless cars which are retrofitted with expensive 3-D laser sensors, SCOT—a retrofitted Mitsubishi iMiEV—relies on low-cost off-the-shelf LIDAR sensors which enable the car to drive autonomously, independent of the Global Positioning System (GPS). This unique feature allows it to drive even in tunnels and places where GPS signals would be hindered.
“Since the launch of SCOT in January 2014, we have added new image processing algorithms for traffic light detection; and more advanced decision-making capability for navigation through intersections such as T-junction/cross junction and zebra crossings. Our demonstration today takes us one step closer to making driverless cars a reality in Singapore,” said Professor Daniela Rus, SMART Principal Investigator for the Future Urban Mobility (FM) Interdisciplinary Research Group (IRG).
A collaborative project between SMART and NUS, this driverless car aims to resolve the “first- and last-mile problem”. It also aims to help promote car-sharing as the driverless car is able to resolve the ‘rebalancing’ issue, that is, getting the car to the next car-sharing customer once the previous customer drops off the car.
“Going forward, our R&D will focus on how SCOT can recognize road signs, lane markings and more; and we hope that with the support of the government, we can expand this Mobility-on-Demand service demonstration over a larger section of One-North, beyond this 6 km route,” added Associate Professor Marcelo Ang from the Department of Mechanical Engineering and Acting Director of the Advanced Robotics Center, NUS Faculty of Engineering.
“This will not only help us to learn and improve the AV system, but also provide a visible platform to increase public awareness and government support in our endeavor to create better transport solutions for urban cities.”
———
Source: Singapore-MIT Alliance for Research and Technology.
Disclaimer: This article does not necessarily reflect the views of AsianScientist or its staff.